Summer 2010 & Summer 2011
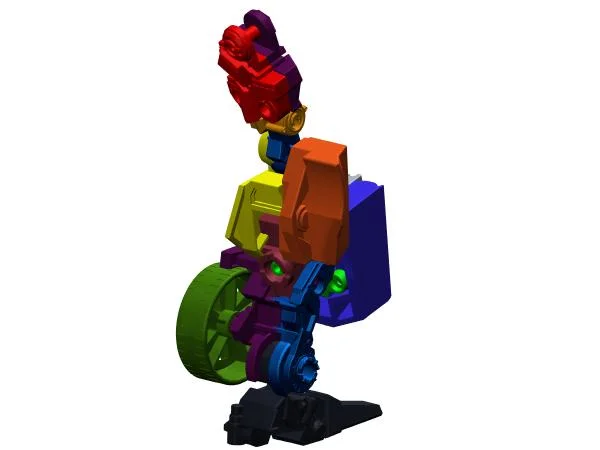
E128 - Advanced Engineering Graphics
Spring 2010 with Professor Lieu
Earned the Alexander and Ethel Levens Award for excellence in engineering graphics, computer aided design, 3D modeling and animation
ME122 - Processing of Materials in Manufacturing
Spring 2012 with Professor Youssefi










This class taught fundamentals of manufacturing methods and provided the opportunity to test 3 types of processes. The team projects are detailed below with photos.
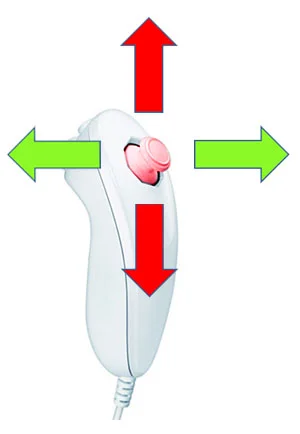
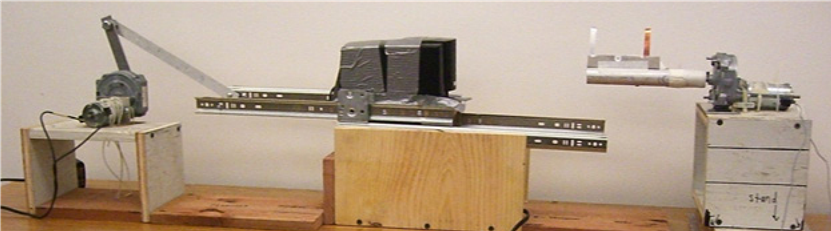
ME102B - Mechatronics
Fall 2010 with Professor Kazerooni
E128 - Advanced Engineering Graphics
Spring 2010 with Professor Lieu